Matek sistemamodello
Elenco matek sistemamodello
-

Questo fintanto che hanno la stessa frase vincolante e le stesse opzioni di configurazione (dominio normativo, opzioni prestazioni e dati aggiuntivi)accendi e spegni il ricevitore tre volte2assicurati che il led stia eseguendo un doppio lampeggio veloce, che indica che il ricevitore è in modal”more details about expresslrs, pls check outexpresslrs wikicablaggio con fc:ricevitore rx - fc uart_tx per telemetriaricevitore tx - fc uart_rx per controlloricevitore 5v - fc 5v o 4v5ricevitore g - fc gndprotocollo ricevitore: ricevitore seriale - crsfrilegatura tradizionale:i ricevitori hanno expresslrs fw v12gdimensioni pcb: 21x15mmesp8285, sx1280imltrtpa/lna: at2401cmolex 479480001 antenna smtfrequenza rf: 2,4 ghz ismpotenza telemetria: 20dbmat2401c guadagno rx: 12dbprotocollo ricevitore: crsftensione di ingresso: 4~9v dc @ 5v paddissipazione di potenza: 40~45ma (prima del collegamento), 60~65ma (vincolante), 90~95ma (modalità wifi)firmware:expresslrs matek_2400_rxaggiornamento del firmware tramite uart o wifielrs-r24-s: disabilita “use_diversity” (non selezionato) quando lampeggia nel configuratore expresslrsnota:“qualsiasi ricevitore elrs 2mateksys elrs-r24-s 2,4 ghz expresslrs elrs crsf protocollo long range mini rc ricevitore per rc dronespecifiche:marchio: mateksysnome articolo: elrs-r24-s rc ricevitoremodello: elrs-r24-speso: 14ghz tx, di qualsiasi produttore e anche quelli fai-da-te0 precaricato senza binding_phrase14ghz può funzionare con qualsiasi modulo elrs 2
Italia
26639999389648438 €
-

5vscl to fc i2c_sclsda to fc i2c_sdag to fc gndparametersardupilot: arspd_type = 9 (i2c-dlvr-10in)tipscompatible with ardupilot only for now, inav doesnt support it5g (sensor board)wiring5v to fc 4~5for can connection, pls visit aspd-dlvr page, or use as-dlvr-i2c with can node l4313d step file as-dlvr_i2c_step5v dcworking current: 5mared led: 3cominterface: i2c (sclsda)sensor i2c address: 0x28pressure ranges: 2500pamaximum pressure: 75kpaoperating temperature: -25°c ~ 85°cboard supply voltage: 4~51x jst-gh-4p to jst-gh-4p 20cm silicon wire1x pitot tube1x clear silicon tubing40cm3v power indicatorjst-gh sequence: 5v, scl, sda, gndweight: 3zippackage included:1x as-dlvr-i2c sensor boardspecifications:brand name: matekitem name: digital airspeed sensor as-dlvr-i2csensor: all sensors dlvr-l10d,industrial temperature rangedlvr-l10d sensor datasheet, pls visitwwwas-dlvr-i2c support i2c interface onlyall sensors dlvr series is the best airspeed sensor ardupilot currently support
Italia
11016999816894531 €
-

Lampeggiante con configuratore elrsmatek_2400_rx_pwm o diy_2400_rx_pwmpse lo utilizzi cspegnere e riaccendere il ricevitoreutilizzare il pulsante [bind] sullo script transmitter lua, che invia un impulso di binding4se il ricevitore led si accende a luce fissa dal lampeggio lento, è collegato al trasmettitoreassicurarsi che il led stia eseguendo un doppio lampeggio veloce, che indica che il ricevitore è in modalità di collegamento30rilegatura tradizionalei ricevitori hanno expresslrs fw v2accendi e spegni il ricevitore tre volte (dopo aver spazzolato il firmware, la prima accensione entrerà automaticamente in modalità di rilegatura)2specificheesp8285, sx1280/1281connettore antenna: ipex mhf 15x pwm uscitefrequenza rf: 2,4 ghz (2400 ~ 2480 mhz)frequenza pwm: 50 hzpotenza telemetria: 12dbmprotocollo ricevitore: pwm o crsftensione di ingresso: 4~10 v cc @ pad “5” come vccdissipazione di potenza: 45 ma (vincolante), 85 ma (modalità wifi)dimensioni pcb: 25 mm x 13 mmpeso: 2 g con antennafirmwareexpresslrs matek_2400_rx_pwm, o diy_2400_rx_pwmp, ricevitore pwm tramite 1~5 uscite pwm, 4x canali a piena risoluzione (ch1-4), 1x canali di commutazione (ch5 come aux1)expresslrs jhemcu ep24s 2400 rx, crsf ricevitore seriale tramite tx (ch2) e rx (ch3)aggiornamento del firmware tramite uart o wifiassicurati che ricevitore e il modulo tx eseguano entrambi expresslrs 2il ricevitore passerà al lampeggio lento una volta ricevuto limpulso di legame0 precaricato senza binding_phrase1
Italia
1668000030517578 €
-

Cominterfaccia: i2c (scl e sda)sensore i2c indirizzo: 0x28intervalli di pressione: 2500 papressione massima: 75kpatemperatura di esercizio: -25°c ~ 85°ctensione di alimentazione della scheda: 4 ~ 5,5 v cccorrente di lavoro: 5 maled rosso: indicatore di alimentazione 3,3 vsequenza jst-gh: 5v, scl, sda, gndpeso: 3,5 g (scheda sensore)cablaggio5 v a fc 4 ~ 5,5 vda scl a fc i2c_sclsda a fc i2c_sdag allfc gndparametriardupilot: arspd_type = 9 (i2c-dlvr-10in)consiglicompatibile solo con ardupilot per ora, inav non lo supportaas-dlvr-i2c supporta solo linterfaccia i2cper la connessione can, visitare i pls aspd-dlvr pagina o utilizzare as-dlvr-i2c con nodo can l431file di passaggi 3d as-dlvr_i2c_stepspecifiche:marca: mateknome dellarticolo: sensore di velocità dellaria digitale as-dlvr-i2csensore: tutti i sensori dlvr-l10d, campo di temperatura industrialescheda tecnica del sensore dlvr-l10d, visita per favorewwwzipil pacchetto include:1x scheda sensore as-dlvr-i2c1x cavo in silicone da jst-gh-4p a jst-gh-4p da 20 cm1x tubo di pitot1x tubo in silicone trasparente da 40 cmtutti i sensori della serie dlvr sono i migliori sensori di velocità dellaria attualmente supportati da ardupilot
Italia
108 €
-

Questo fintanto che hanno la stessa frase vincolante e le stesse opzioni di configurazione (dominio normativo, opzioni prestazioni e dati aggiuntivi)mateksys elrs-r24-d 2”maggiori dettagli su expresslrs, controllawiki di expresslrscablaggio con fcricevitore rx - fc uart_tx per telemetriaricevitore tx - fc uart_rx per controlloricevitore 5v - fc 5v o 4v5ricevitore g - fc gndprotocollo ricevitore: ricevitore seriale - crsfrilegatura tradizionalei ricevitori hanno expresslrs fw v14ghz expresslrs elrs diversity duble antenna protocollo crsf long range mini rc ricevitore per rc dronespecifiche:marca: mateksysnome articolo: elrs-r24-d rc ricevitoremodello: elrs-r24-dpeso: 3 g (con 2 antenne)dimensioni pcb: 21x15mmesp8285, sx1280imltrtpa/lna: se2431lconnettore antenna: ipex mhf 1frequenza rf: 2,4 ghz (2400 ~ 2480 mhz)potenza della telemetria: 22,5 dbm ~ 23 dbmse2431l guadagno rx: 12,5 dbdiversity (commutazione dellantenna), predefinito ant2protocollo ricevitore: crsftensione di ingresso: 4~9v dc @ 5v paddissipazione di potenza: 40~45ma (prima del binding), 70~75ma (binding), 90~95ma (modalità wifi)firmware:expresslrs matek_2400_rxaggiornamento del firmware tramite uart o wifielrs-r24-d: abilita “use_diversity” (selezionato) quando lampeggia nel configuratore expresslrsnota:“qualsiasi ricevitore elrs 2accendi e spegni il ricevitore tre4ghz tx, di qualsiasi produttore e anche quelli fai-da-te0 precaricato senza binding_phrase14ghz può funzionare con qualsiasi modulo elrs 2
Italia
29450000762939453 €
-
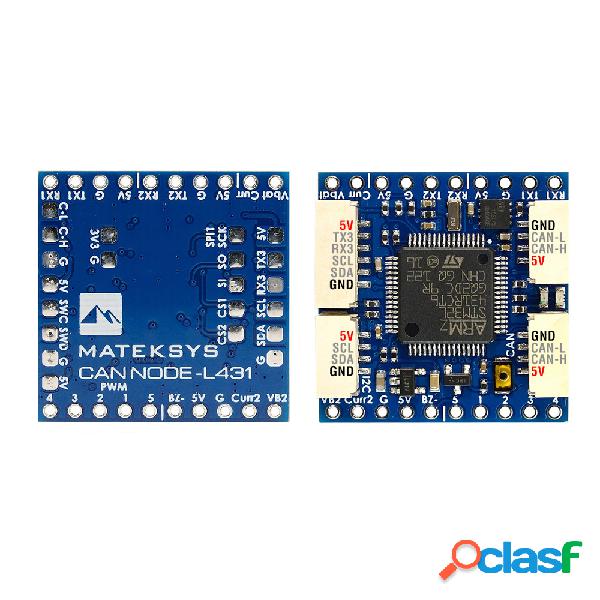
Specifiche:-mcu: stm32l431xc, 256kb flash- velocità dati del ricetrasmettitore can fino a 5 mbit/s nella fase rapida can fd- 1x can, protocollo dronecan (2x connettori gh-4p in parallelo)- 3 uartuart1, ricambiouart2, msp predefinito, dfuuart3, gps predefinito- 1x i2cper il sensore di velocità dellaria perifericoper barometro perifericoper periferiche compass qmc5883l- 1x spiper periferica rm3100- 4x adcbatt_volt, pin 5batt_curr, pin 6batt2_volt, pin 15batt2_curr, pin 16- 5x pwm uscite- 1x gpio con tim16 per buzzer- debug st, swclk e swdio- ledblu, lampeggio veloce, avvioblu, lampeggiante lento, funzionanteindicatore rosso da 3,3 v- intervallo di tensione in ingresso: 4,5 ~ 5,5 v @ 5 v pad/pin- consumo energetico: 40 ma- temperature di esercizio: -20~80 °cfisico2x jst-gh-4p(sm04b-ghs-tb) per can1x jst-gh-4p (sm04b-ghs-tb) per i2c1x jst-gh-6p(sm06b-ghs-tb) per uart3+i2cdimensioni della scheda: 26 mm * 26 mm * 6 mmzipfirmwareardupilot ap_periph matekl431-periph o matekl431-airspeedaggiornamento tramite lo strumento gui dronecanparametri: parametri nel controllore di volo:can_d1_protocol = 1can_p1_driver = 1gps_type = 9con questa scheda, puoi facilmente utilizzare la libreria di driver ardupilot per convertire le periferiche gnss, bussola, barometro, sensore di velocità relativa e gpio (notifica pwm, buzzer/led) supportate da ardupilot in periferiche bus dronecanpanoramica:- can-l431 è un nodo adattatore basato sul firmware arudpilot ap_periph3,7 gfile 3d: can-l431_step
Italia
218700008392334 €