256kb
Elenco 256kb
-
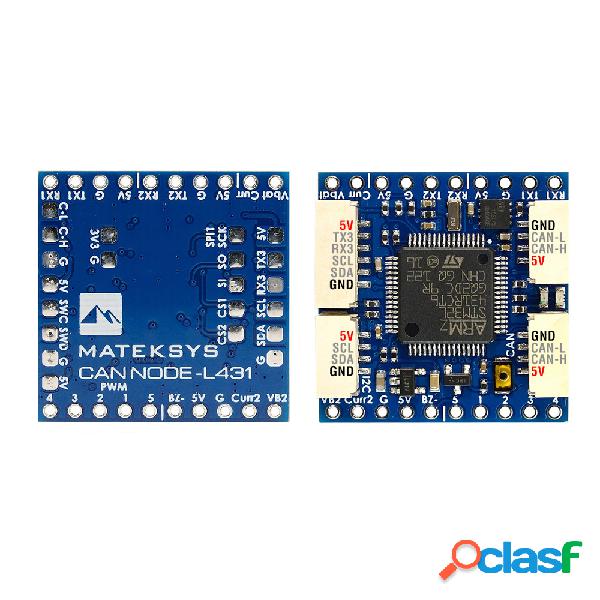
Specifiche:-mcu: stm32l431xc, 256kb flash- velocità dati del ricetrasmettitore can fino a 5 mbit/s nella fase rapida can fd- 1x can, protocollo dronecan (2x connettori gh-4p in parallelo)- 3 uartuart1, ricambiouart2, msp predefinito, dfuuart3, gps predefinito- 1x i2cper il sensore di velocità dellaria perifericoper barometro perifericoper periferiche compass qmc5883l- 1x spiper periferica rm3100- 4x adcbatt_volt, pin 5batt_curr, pin 6batt2_volt, pin 15batt2_curr, pin 16- 5x pwm uscite- 1x gpio con tim16 per buzzer- debug st, swclk e swdio- ledblu, lampeggio veloce, avvioblu, lampeggiante lento, funzionanteindicatore rosso da 3,3 v- intervallo di tensione in ingresso: 4,5 ~ 5,5 v @ 5 v pad/pin- consumo energetico: 40 ma- temperature di esercizio: -20~80 °cfisico2x jst-gh-4p(sm04b-ghs-tb) per can1x jst-gh-4p (sm04b-ghs-tb) per i2c1x jst-gh-6p(sm06b-ghs-tb) per uart3+i2cdimensioni della scheda: 26 mm * 26 mm * 6 mm3,7 gfile 3d: can-l431_stepzipfirmwareardupilot ap_periph matekl431-periph o matekl431-airspeedaggiornamento tramite lo strumento gui dronecanparametri: parametri nel controllore di volo:can_d1_protocol = 1can_p1_driver = 1gps_type = 9panoramica:- can-l431 è un nodo adattatore basato sul firmware arudpilot ap_periphcon questa scheda, puoi facilmente utilizzare la libreria di driver ardupilot per convertire le periferiche gnss, bussola, barometro, sensore di velocità relativa e gpio (notifica pwm, buzzer/led) supportate da ardupilot in periferiche bus dronecan
Italia
218700008392334 €